



青岛日报社/观海新闻桂山岛10月26日讯 10月24日清晨,桂山岛附近下起了小雨。从窗外望出去,天色一片蒙蒙。在这种无事且宁静的环境中,最惬意的,莫过于学习“宰予昼寝”。
上午10点多,破云而出的太阳打败了淅淅沥沥的小雨,室外的阳光暖洋洋的,清晨换上的长袖不得不脱了下来。工作甲板上,科研人员又忙碌起来。这一次,“3000米海底沉积物多参数探针及布放系统”的浅海海试已经势在必行。

无人船下水。
吃过午饭,是午休的时间。躺在床上不多久,忽然隐约听到走廊里交谈的声音:“天上飞的、水中漂的、水下游的,即将海试。”听到这里,记者立刻从床上弹了起来,像一个失业的人重新找到了工作一样,穿上鞋子,拿起相机就往外跑。
 无人船下水。
无人船下水。
来到艇甲板,发现工作人员已经用吊车把无人船吊了起来,正准备入水。这个无人船,专业的说法也叫“水面自主观测系统”,是青岛海地所2019年底自主研发的海洋定点观测设备,目前正进入后期的海试阶段。
 无人机起飞。
无人机起飞。
无人船下水后,开始围着“海洋地质九号”科考船游弋。同时,停机坪上的无人机正准备起飞。该项目海试的负责人单瑞介绍,海上无人机和陆地无人机大有不同,在海上,续航力和抗风能力要求很高,目前海试的“六旋翼无人机”,设计指标是抗6级风,续航力达1个小时。
 无人机、无人船、水下有缆机器人同时海试。
无人机、无人船、水下有缆机器人同时海试。
这时,单瑞请大家远离无人机,开始遥控操作。一会儿,海平面上的无人船和无人机实现了同框。当这两件设备来到船尾,水下有缆机器人(ROV)也已开始下水。操作ROV的工作人员告诉记者,目前这个设备是观察级,搭载了前置声纳、超短基线及3个摄像头,可以实现最大下潜水深200米,满足探查水下目标物等需求。

无人船和水下有缆机器人。
其实,无人船、无人机和水下有缆机器人这三件设备,其主要的用途都是为了探查探测。据本航次首席科学家杨源介绍,在海九母船上,可以10公里以内遥控无人船,实现对海面任意水深的定点观测;可以20公里以上遥控无人机,实现船舶超长拖缆作业时的远距离观测。未来,无人机将通过电脑设置命令,在海上实现动态起降、全无人操控。
 科研人员安装短柱状取样装置。
科研人员安装短柱状取样装置。
下午3点左右,这3个设备还没有海试结束,工作甲板上,另一个海试项目的科研人员已经开始了对“3000米海底沉积物多参数探针及布放系统”的海试。与“自主姿态调节取样系统”相比,“3000米海底沉积物多参数探针及布放系统”不仅可以通过配套的短柱状取样装置对深海海底沉积物进行取样,而且更强的是可以实现原位、多参数探测。
 “3000米海底沉积物多参数探针及布放系统”。
“3000米海底沉积物多参数探针及布放系统”。
“一般而言,只要是可以 ‘原位探测’的设备,基本上都很金贵。” 该项目海试的负责人虞义勇介绍,所谓“原位探测”,就是可以对海底沉积物进行实时、当前位置的探测分析,而要想实现“原位探测”,首先需要购置这样一套昂贵的设备,其次需要通过光电复合缆进行连接,这种缆一般只有在先进的科考船上才会配备。
 科研人员对“3000米海底沉积物多参数探针及布放系统”进行海试。
科研人员对“3000米海底沉积物多参数探针及布放系统”进行海试。
为了更直观地了解这套设备的特点,该项目海试的另一位负责人郭建卫带领记者来到设备监控室。监控室里有两台电脑,一台正在显示该设备在海底的实时画面,另外一台列满了各种参数信息。郭建卫介绍说,目前,该设备不仅可以对3000米的海底沉积物进行原位探测分析。同时,借助于我国自主研发的各类海洋传感器,科研人员还对该设备的探头进行了高度集成,由过去探测海底沉积物的4个参数,到现在达到9个,从而实现了多参数探测。
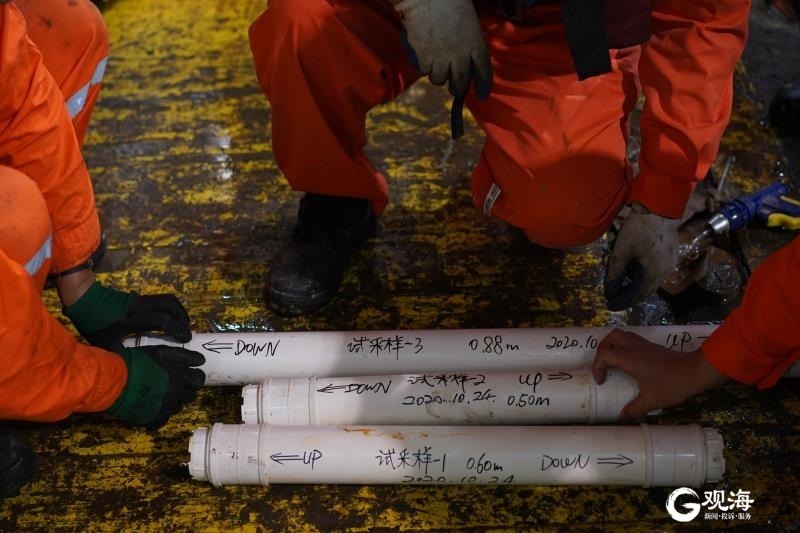 “3000米海底沉积物多参数探针及布放系统”取到的海底沉积物样品。
“3000米海底沉积物多参数探针及布放系统”取到的海底沉积物样品。
经过近4个小时的海试,晚上7点半,看得见摸得着的“成果”出来了。该设备搭载的静力取样装置,先后取出了3根海底沉积物样品。虞义勇告诉记者,这些海底沉积物样品,依据不同的科研项目,具有不同的使用价值。简单来说,通过分析样品从淤泥到砂石的分布等物理化学特征,既可以了解取样海域目前的海底状态,比如底质、资源、污染等基本环境地质信息,也可以了解取样海域的某个阶段的地质历史发展过程。(青岛日报/观海新闻特派记者 李勋祥)
责任编辑:荣潇
